
Ballbots (2013-present)
Over the years, we took part in the design and development of various ballbots and ballbot control systems. The latest of these we are currently developing in collaboration with the Department of Mechatronics (University Politehnica of Bucharest). The previous ones were developed in collaboration with the InGear Laboratory (University Politehnica of Bucharest).
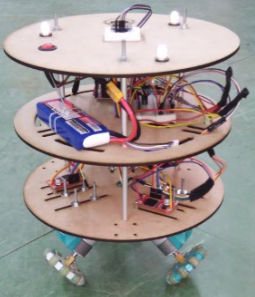
The third ballbot:
Project Status
2018: We’re improving the ballbot mechanical structure.
2017: The third ballbot can balance and move to a specified position.
2015: The second ballbot can balance!
2013: First ballbot is alive!
Team
Project leaders Monica Patrascu & Viorel Gheorghe
Core team Vlad Bărbulescu, Ioan Marica
Associates & Students Daniel Rosner; Students: Dorin Petre, Iulian Calciu
Funding
This project is being supported through the Complex Systems Laboratory. Find out how to contribute to funding this project further.
Third ballbot: this project has been partially funded by the “Excellence Research Grants” Program, UPB – GEX. Identifier: UPB–EXCELENȚĂ–2016, “Design, Development and Implementation of a Triaxial Symmetric Robot Test Platform”, 37/2016.
First ballbot: conference travel for students has been funded by the Sectoral Operational Programme Human Resources Development 2007-2013 of the Ministry of European Funds through the Financial Agreement POSDRU/187/1.5/S/155420.
Publications
- Barbulescu V., Marica I., Gheorghe V., Nistor M., Patrascu M. 2017 – Encoder-based Path Tracking with Adaptive Cascaded Control for a Three Omni-wheel Robot, 16th RoEduNet International Conference – Networking in Education and Research, RoEduNet NER’17, Targu-Mures, Romania, 10.1109/ROEDUNET.2017.8123752
- Calciu I., Vasilescu L.M., Draghici A., Rosner D., Patrascu M. 2015 – Three Omni-wheel Ballbot Optimum Implementation, 14th RoEduNet International Conference – Networking in Education and Research, RoEduNet NER’15, Craiova, Romania, pp. 223-227,dx.doi.org/10.1109/RoEduNet.2015.7311999