
CRIS: Cylindrical Robots In a Swarm (2016 – 2018)
CRIS is a platform for research and didactic applications regarding swarm robotics.
The project consists of two parts:
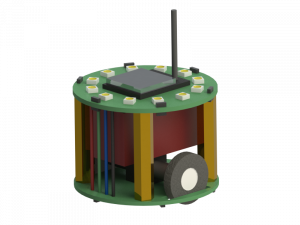
- The first part is the actual hardware, numerous small wheeled robots, 50mm in diameter. These robots are capable of communicating with each other through Wi-Fi, Bluetooth, and infrared. Each robot has many infrared floor and side-firing sensors, and a 9-DoF inertial measurement unit. The robot moves around on 2 wheels driven by DC motors. Each wheel has an encoder, allowing velocity control and position tracking through dead reckoning. On top of the robot there are 12 programmable RGB LEDs, used as status indicators, computer vision markers or as anything else the user desires. The robot is powered by a rechargable Li-Ion battery, which can be quickly swapped out when depleted.
- The second part of the project is the software. The robots can run custom programs on their embedded processor. There is also a management interface, running the user’s computer, which allows monitoring, programming and debugging the robots. Programs can be written in C or Python, with a tiered, hierarchical API available to control the robot. Each tier of the API abstracts the one below it; the lowest tier allows direct hardware control, while the highest tier offers complex behaviors, such as movement to a position while avoiding obstacles. This allows the user to decide whether to focus only on the robots’ highest-level behaviors or have complete control over what the robots.
Project Status
2018: We are currently implementing the beta version of the robot.
2017: Alpha version, floor sensor Braitenberg test.
Team
Project leader Ioan Marica
Core team Monica Patrascu
Associates & Students Master students: Ionuț Banu
Funding
This project is being supported through the Complex Systems Laboratory. Find out how to contribute to funding this project further.
Publications
- Marica I., Popescu D.C., Patrascu M. 2018 – Plug-and-play Self-configuration and Integration in Swarm Robotics, 17th RoEduNet International Conference – Networking in Education and Research, RoEduNet NER’17, Cluj-Napoca, Romania
- Marica I., Patrascu M. 2017 – A Geno-Neural Approach to Data Fusion for Fixed Infrared Sensor Arrays, 16th RoEduNet International Conference – Networking in Education and Research, RoEduNet NER’17, Targu-Mures, Romania, 10.1109/ROEDUNET.2017.8123751